熱線電話:0769-28639799
熱線電話:0769-23380137
傳真電話:0769-81380536
網? ? ? ? 址:www.khvost.com
郵? ? ? ? 箱:583653599@qq.com
地? ? ? ? 址:東莞市萬江區莞穗大道166號
永磁直線同步電機是近年來研究較為廣泛的一種新型電機,和普通的旋轉電機相比,在機械結構、磁路等方面均發生了較大的改變。此外,PMLSM還存在因磁路不閉合所造成的端部效應,這無疑增加了控制難度。對PMLSM控制系統建立對應的數學模型是分析其運動機能的根本方法,且數學模型還可以客觀反映出物理對象的本質特征;因此,為了后續能對PMLSM伺服控制系統進行系統地分析,需要首先建立PMLSM對應簡單易行的數學模型。
在現代控制理論中,通常采用狀態空間方程來表示整個控制系統的數學模型;因此,參考現代控制理論,把表征其運動規律的物理量作為系統的狀態向量,并結合相關的數學模型即可建立PMLSM伺服系統的狀態方程。
江晟電機主要根據PMLSM的物理結構及其工作原理,推導了永磁直線同步電機的軸數學模型,繼而提出了永磁直線同步電機矢量控制方案,最后在MATLAB/SIMULINK環境中完成了對PMLSM伺服控制系統模型的建立,為后續估計器以及速度環伺服策略的研究打下基礎。
一、直線電機基本構造
圖1:旋轉電機到直線電機轉變過程示意圖
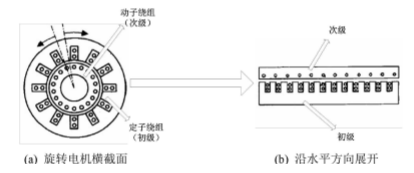
直線電機工作原理將三相對稱正弦交流電通入到直線電機動子的三相繞組中,會產生一個水平方向呈正弦分布的行波磁場,如果忽略邊端效應,該磁場與旋轉電機產生的氣隙磁場類似。當動子的三相電流以一定頻率變化時,這個行波磁場便會依照A、B、C相序做直線移動,在這過程中便會與永磁體勵磁磁場發生關系,繼而產生電磁推力;此外,因直線電機次級永磁體與背鐵(定子)在運動平臺上均是不可動的,故江晟電機的動子在受到電磁推力作用下便會以速度(m/s)沿著直線導軌移動,其運動方向正好是行波磁場移動的反向。通過以上介紹,再結合旋轉電機工作機理,可看出直線電機動子的運動速度與旋轉電機磁場在定子內圓面上的同步速率一致。
二、直線電機軸數學模型
數學模型是探究自然界物理對象的基本方法,對實際物理對象進行真實完整的建模,對研究其本質規律有著重要意義。因此,為了系統地分析與研究PMLSM伺服控制系統,東莞電機廠首先需要建立相應的數學模型。
這里為了便于對直線電機進行分析,并建立相應簡單易行且能夠客觀反映PMLSM運動規律的模型,現需對以下情況進行說明:
(1) 忽略直線電機鐵心兩端開斷所引起的端部效應的影響;
(2) 環球電機初級三相繞組完全對稱,各繞組軸線空間相差120°電角度;
(3) 永磁體沒有阻尼作用,且電機動子繞組阻尼為零;
(4) 忽略磁路飽和、磁滯以及渦流損耗,視電機磁路為線性的。
為了PMLSM伺服控制系統仿真模型搭建以及后續估計算法研究的方便,這里我們選擇在d-q坐標系下進行討論。
如圖2所示,永磁直線同步電機電樞的三相繞組軸線分別為a、b/c,其軸線之間的夾角呈120°,構成了一個三相坐標系。通常在數學中,平面的矢量可以用兩相直角坐標系來描述,因此為了設計簡便,在電樞坐標系中定義了一個直角的坐標系。
圖2:永磁直線同步電機坐標變換矢量圖
